Photo: Anton Olsen
One of the greatest challenges when designing a VEX robot is balancing weight, speed and controllability. When competing in a 12 foot square arena speed might not seem too important, but what about on the open road, or in my case, the 200,000 square foot portion of the Dallas Convention Center that we borrowed for the VEX World Championship.
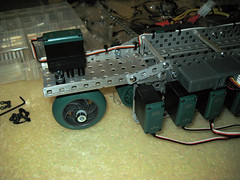
I thought it would be nice to develop an over the top robot that used a number of new products at VEX. I picked out some high strength gears and high strength chain from the warehouse, four power expanders from the beta test bench, and borrowed a pair of VEXNet 1.5 adapters from the a test bot. After adding in 16 motors, a lot of aluminum and much sweat and blood, I present VEXspeed, the drag racing robot.
Steering is accomplished with a single trailing arm wheel. The wheel axle is bent a bit like an L and driven directly off the servo. Since the axle trails behind (due to a bend) it is very stable going forward. The steering axis is scaled down to 20% in the transmitter to keep me from rolling it, but leaves me with a 40 foot turning radius.
Top speed is about 12 feet per second now, but with a little work I expect to top 24 fps, or about 16 miles per hour. The biggest obstacle to getting past 20 fps is getting all the motors to work together. To keep 100% VEX I had to use a different battery for each power expander. Normally this wouldn’t be a problem except I’ve put all four power expanders to work on the same drive train. As soon as a battery voltage drops, the other three pull it along, slowly stripping its gears.
Rev 5 will stray from the 100% VEX mantra to reduce weight and wiring difficulties. I’m switching to VEXplorer motors, using an inline motor controller for every two motors, two power expanders instead of four and driving it all off two batteries in parallel. I have also redesigned the frame to be lighter and give me more gearing options so I can gradually increase the gearing til I find the limit.
Even as this is posted, I’ve started working on Mk II. The new design will be lighter, stronger, and hopefully faster.
I plan to bring VEXspeed 2 to the Maker Faire in SF in a few weeks, so look for it there.
